X-Guide2 の実機デモ体験をしてきました
共に実機が展示されていました。
見た目は、似ています。
色は同じですが、センサーとパソコンの中身=スペックが違います。
センサーとエンジンが違えば、車なら爆速が出るでしょう。
そんな違いを感じるでしょうか?

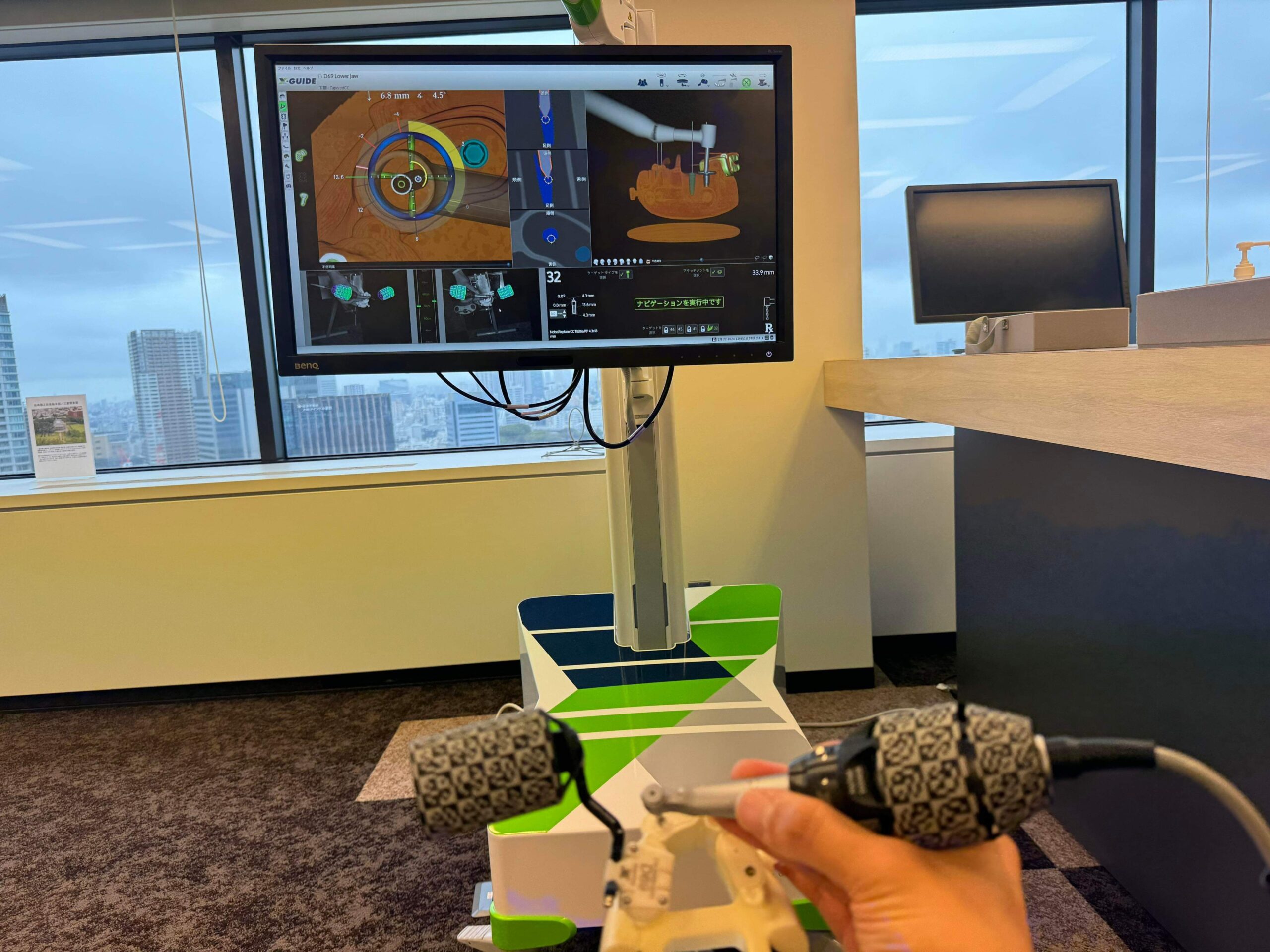
上から見るカメラ目線の機械から電波を発信して、患者さんとドリルの位置関係を確認します。
その位置関係をパソコンに表示します。
インプラント手術時には、口腔内ではなく、パソコンの画面を見ながら手術を行うらしいです。
シューティングゲームのようですね。

この二つが、口腔内の位置関係と、ドリルの位置関係を決めるQRコードに包まれた器具です。
このQRコードを上から見ているそうです。
人工衛星と、車GPSセンサーの関係ですね。
模型のターゲットに見事的中!
実際の目線です。
パソコンの画面にピントが合い、手元は視野に入っていても、認知されていません。
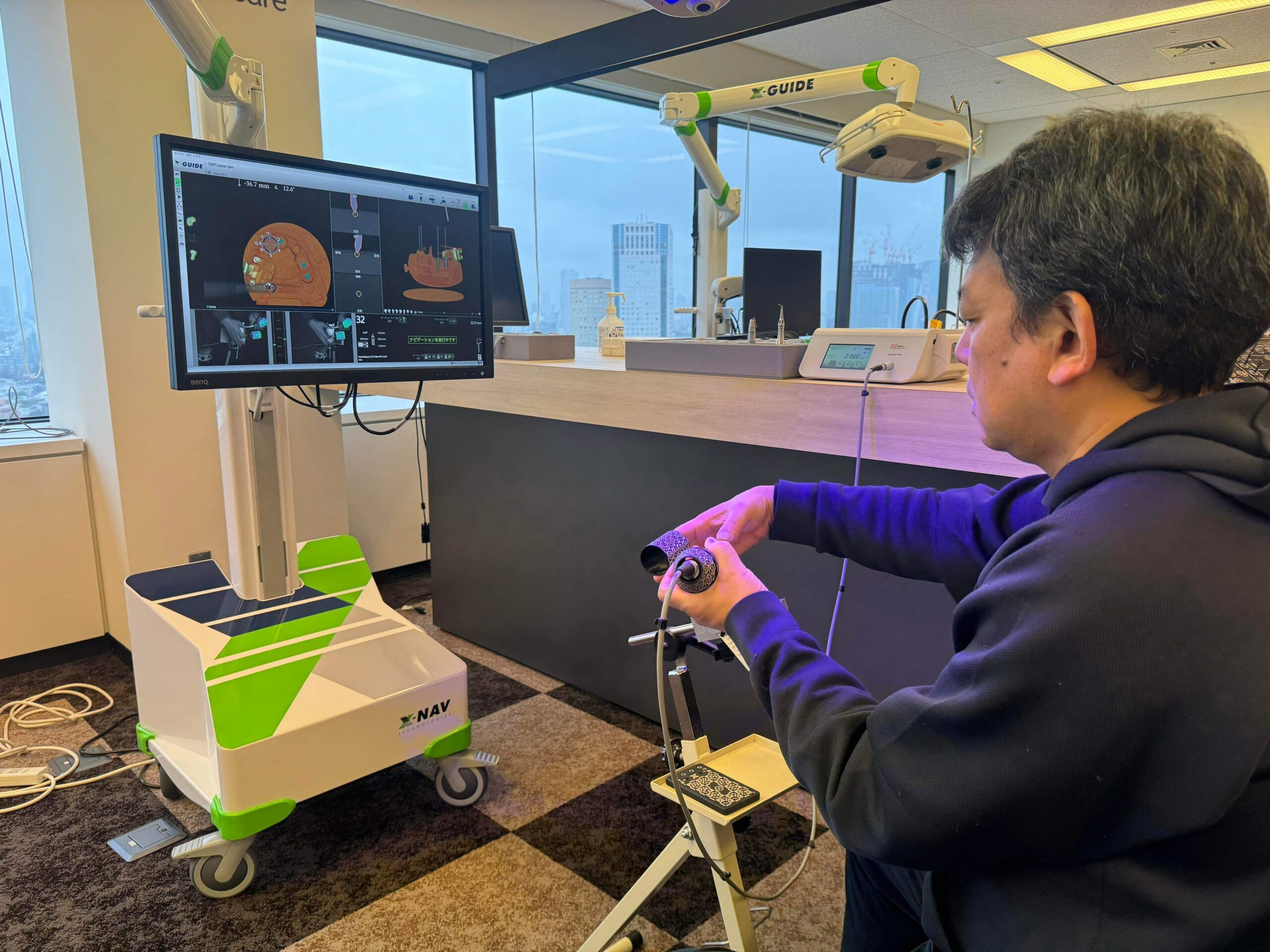
実際にやってた様子です。
視線は正面にあり、ドリルは、両手でしっかり固定して動かしました。
初めての人は、ドリルがふらつくそうですが、僕は常に安定するドリル操作を可能にする両手持ちをしているので「うまいですね。」と褒められました。
テニスで言う、両手打ちってところです。
片手打ちの方が自由度は広いですが、固定が甘くふらつきやすいと考えて、オペは両手打ちをしています。
歯を削るときにも、固定源はしっかり考えいて、学生時代は薬指レストを習いましたが、中指レストに途中で変えました。
中指レストは、やりにくいですが、薬指よりも力が入るので安定するやり方です。
安定した結果を出す為にセンサーでドリル位置を見張ってくれていても、ドリルがブレたら意味がありません。
実際のところは、QRコードのついたセンサー自身の重みでドリルが、ふらつきます。
固定をしっかりして正確な指の動きが、ポイントにやるでしょう。
今回、X-Gurde2を使ってみて、僕との相性は、良さそうです。
導入を楽しみにしています。
全ては、患者さんの未来の為に・・・
下田孝義